Orbweaver

Boston Dynamics robots operate in harsh environments, such as construction sites, but existing controllers lack the durability necessary for these conditions.
My goal was to design a rugged, construction-ready controller that enhances reliability while maintaining precision and ease of use.
Project Overview
PROCESS
Project Requirement
The provided electronic package included a screen, two control sticks, two sets of shoulder switches, and three extra UI switches.
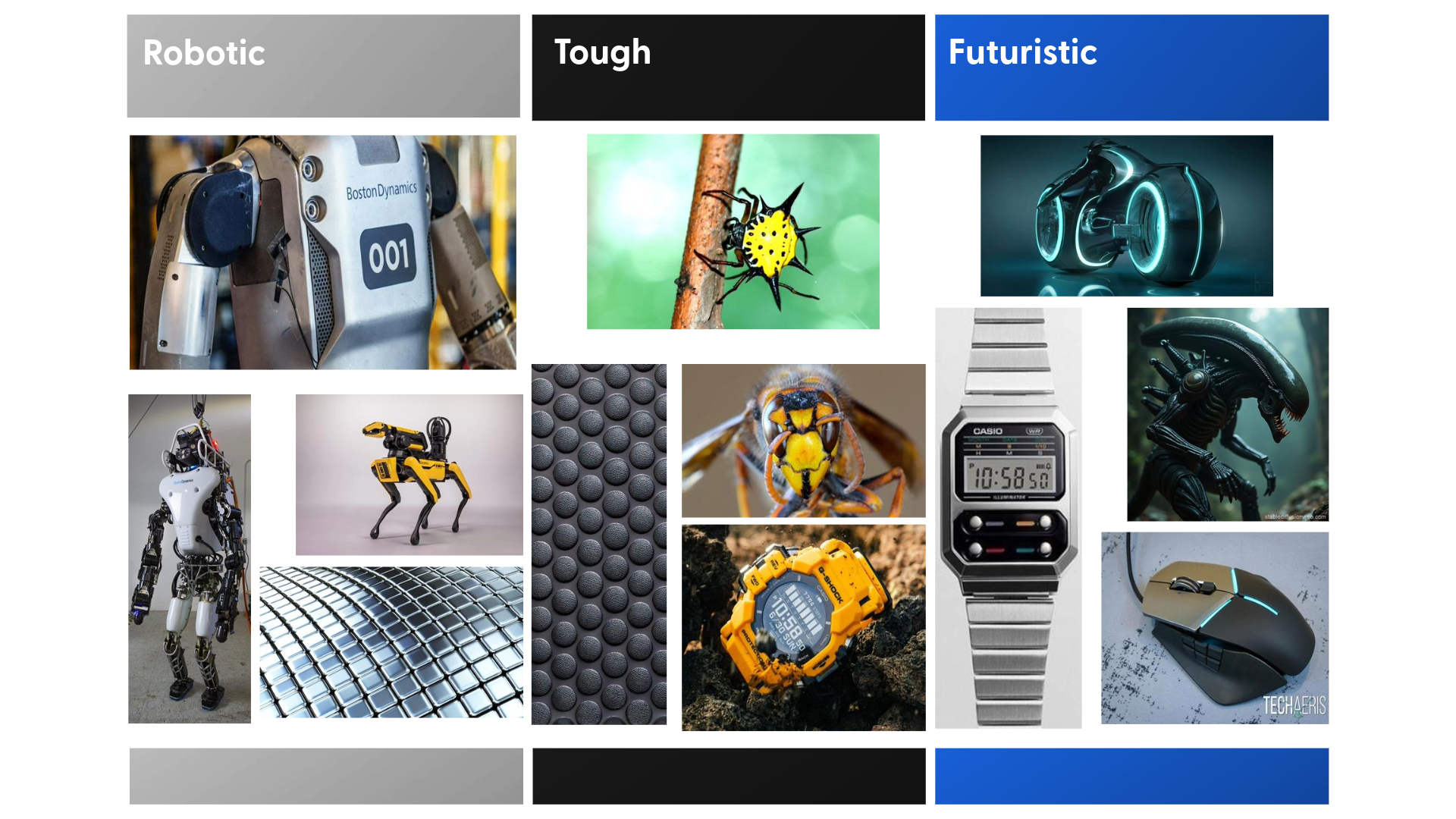
Inspiration
Ideation
In the first stage, I explored a large number of variants for the three chosen concepts through sketching and quickly put together mock-ups.
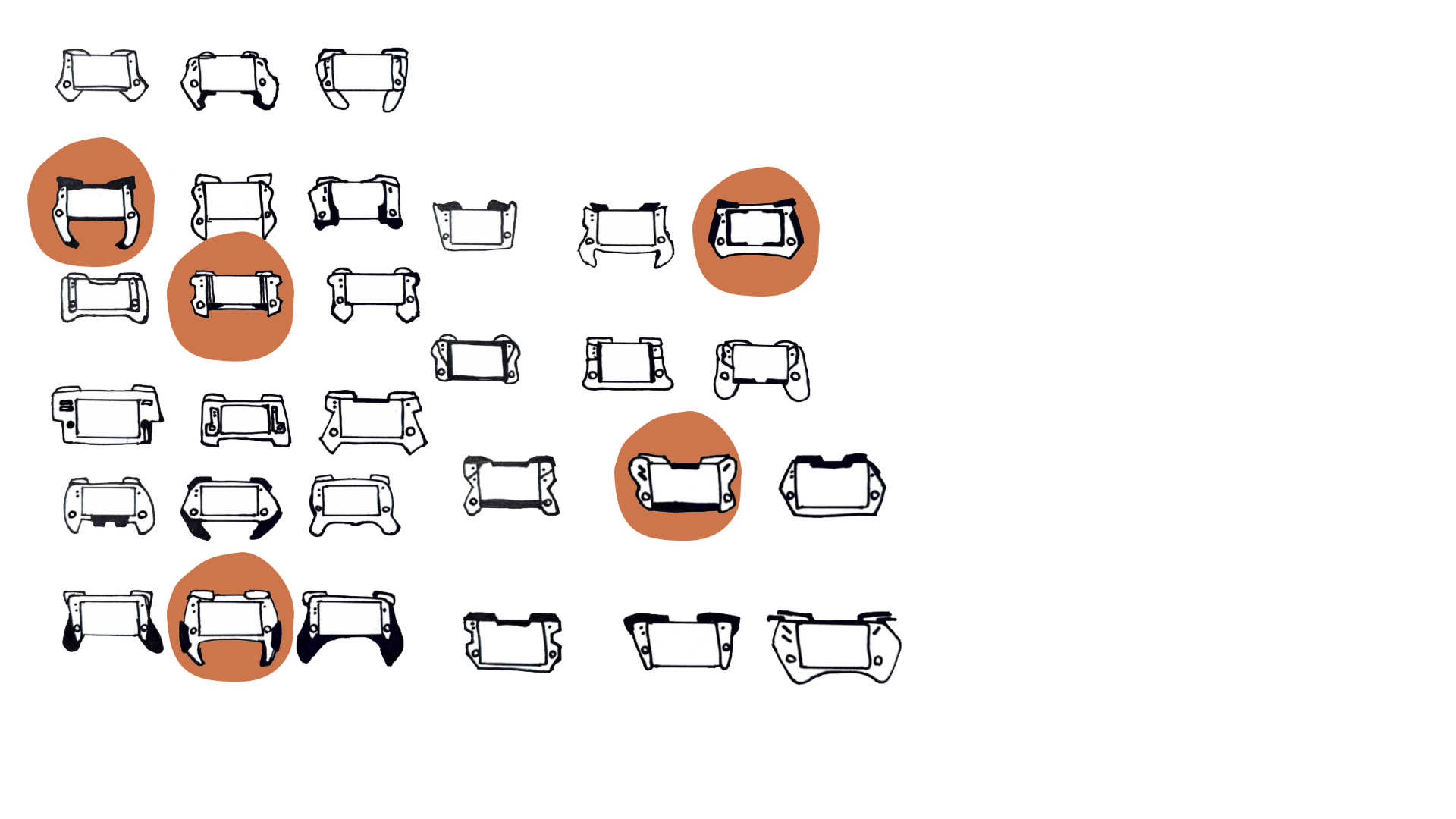

Concepts Variation
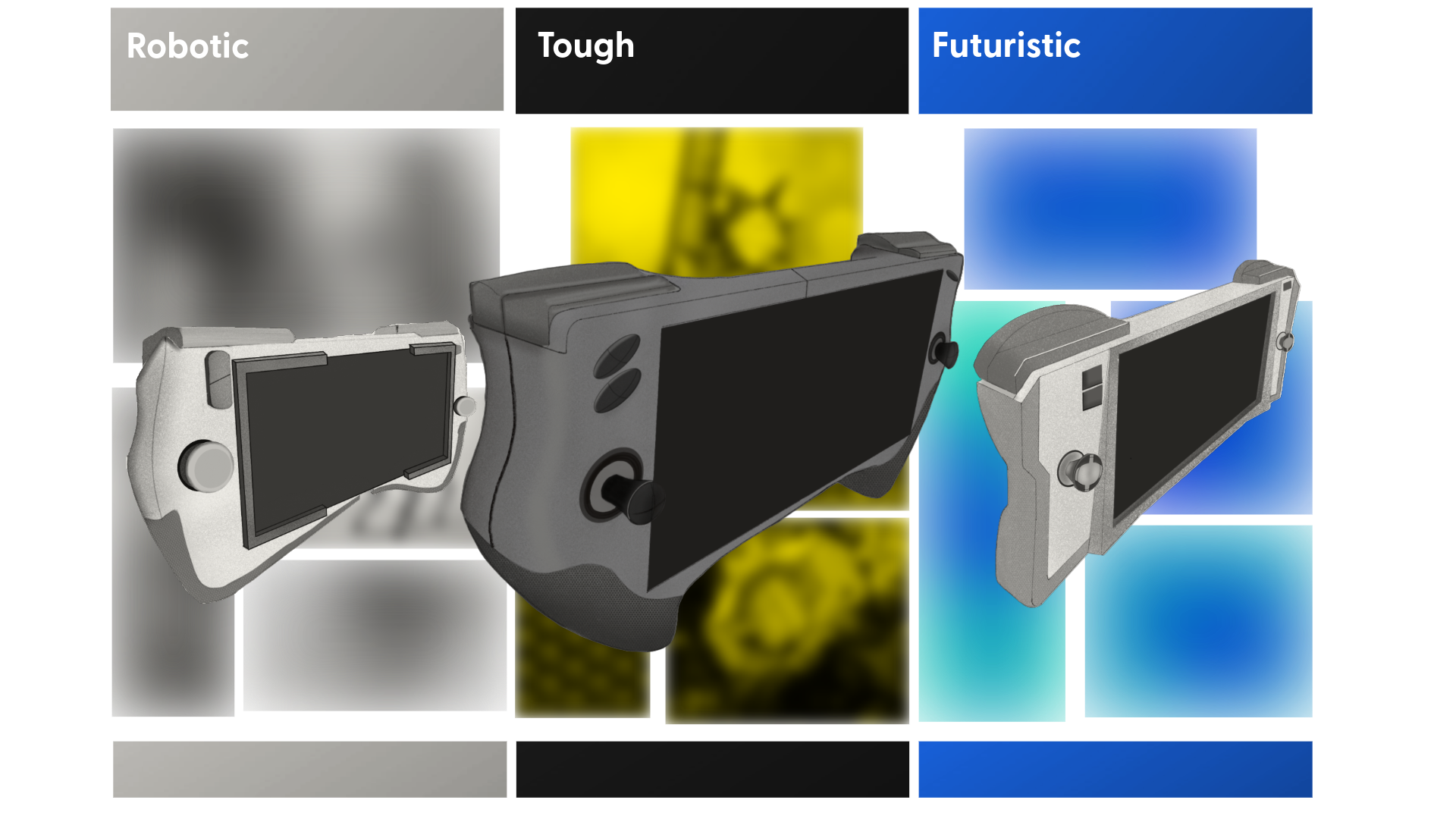
In the next stage of exploration, the top 3 concepts were developed with more refined sketches.

Concept Refitment
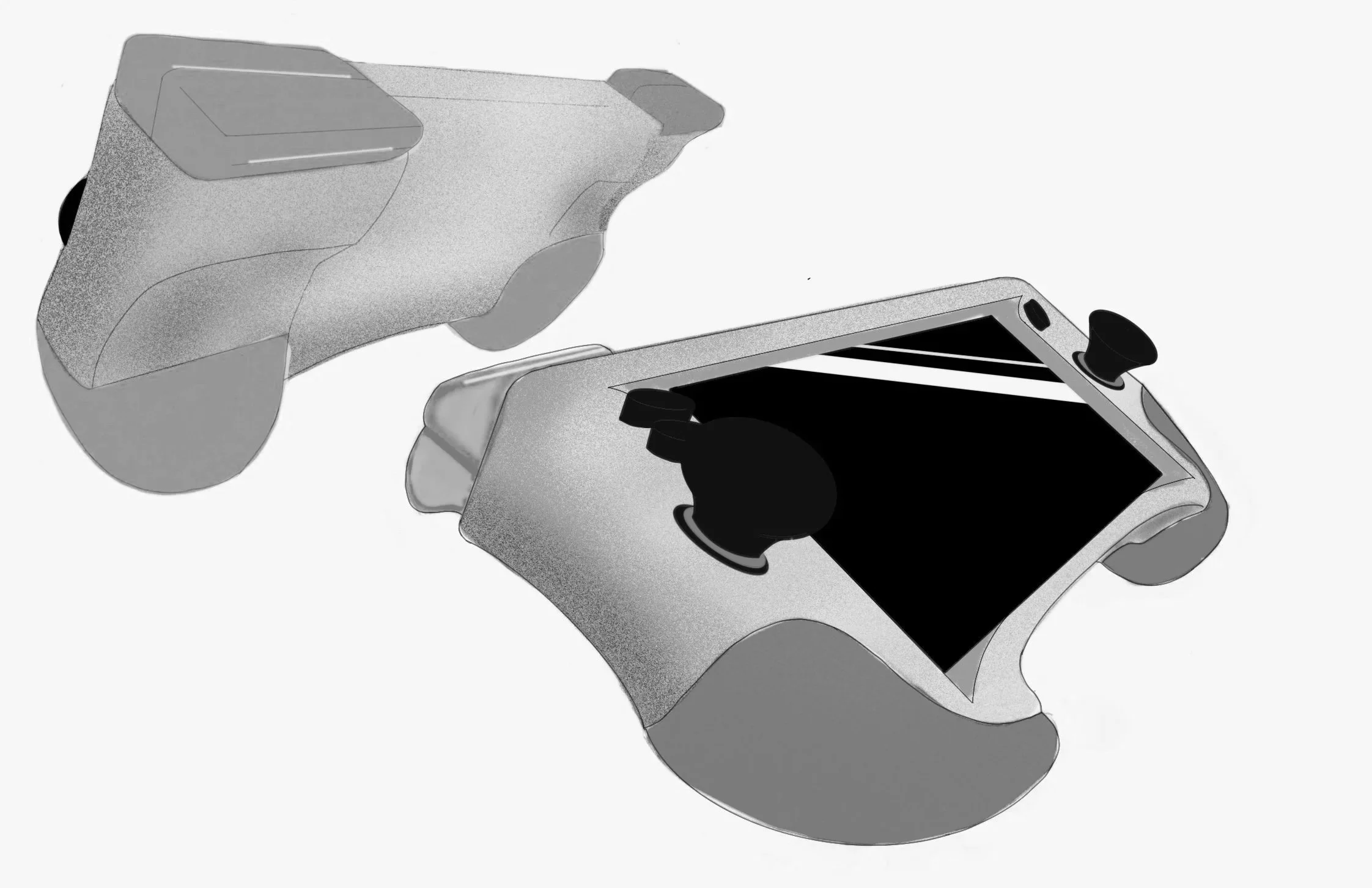
Considering the feedback from tutors, this concept was chosen, and I continued developing the design. I went through multiple iterations on all important components of the system.